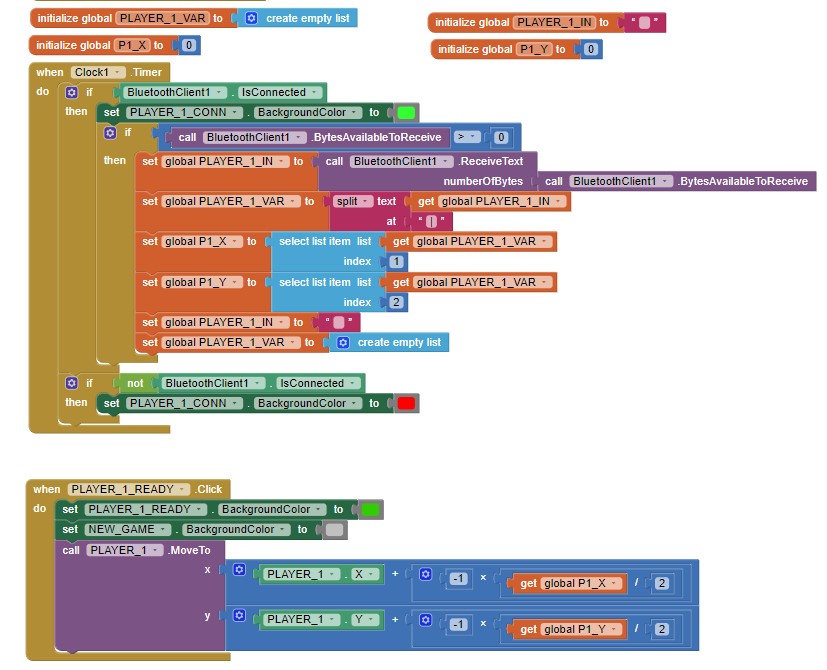
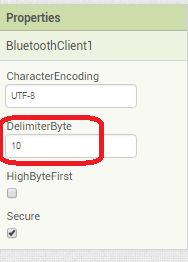
Hi everyone. I'm pretty new to MIT App inventor so any help would be really great. Im trying to make a game, something like a game of tag with an arduino using an MPU6050 as the gyroscope module and hc-05 as bluetooth module. Similar to the one where the ball gets to move around using the phone's orientation sensor, when I move the mpu6050 around, the ball will also move. I have followed some tutorials on receiving data from the arduino but most of them are being printed as text. As there will be some computations involved, I need it to be stored as an integer. Here is a snippet of the part where I get to receive the data. I did some few changes which I think is right based on the tutorials I saw. Whenever I pres the player 1 ready button, I get the error yail divide. Can anyone help, what should I change?