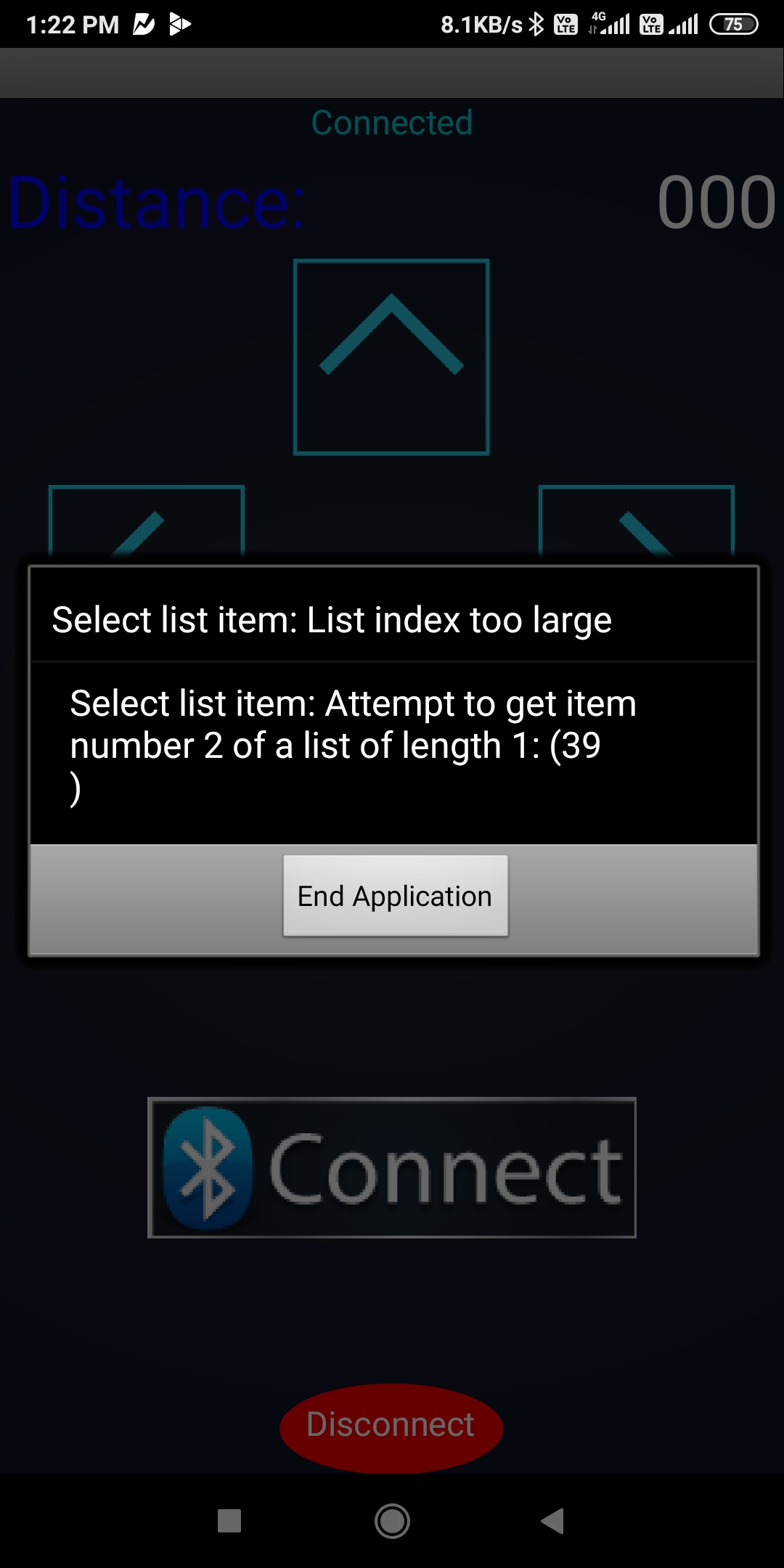
I am making an application to control motors and take sensor data through arduino using Bluetooth connectivity and display it on the app. But there is a error saying "Select list item: List index too large select list item: attempt to get item number 2 of list of length 1:(39) ".
The data in the parenthesis is constantly changing.
project_robot.aia (1.7 MB)
Arduino code:-
#include <SoftwareSerial.h>
#include "dht.h"
#define echopin A0 // echo pin
#define trigpin A1 // Trigger pin
SoftwareSerial BT(2, 3);
#define dht_pin A5 // Pin sensor is connected to
dht DHT;
int motor2Pin1 = 6; // pin 6 on L293D IC
int motor2Pin2 = 7; // pin 7 on L293D IC
int motor2EnablePin = 10; // pin 10 on L293D IC
int motor1Pin1 = 4; // pin 4 on L293D IC
int motor1Pin2 = 5; // pin 5 on L293D IC
int motor1EnablePin = 9; // pin 9 on L293D IC
int state;
int Speed = 200;
int temp;
int hum;
int timer = 0;
int distanceFwd;
long duration;
int chk = 0;
int set = 35;
void setup() {
pinMode (trigpin, OUTPUT);
pinMode (echopin, INPUT );
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(motor1EnablePin, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
pinMode(motor2EnablePin, OUTPUT);
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
BT.begin(9600); // Setting the baud rate of Software Serial Library
delay(500);
}
void loop() {
//if some date is sent, reads it and saves in state
if(BT.available() > 0){
state = BT.read();
Serial.println(state);
if(state > 10){
Speed = state;}
}
distanceFwd = data();
analogWrite(motor1EnablePin, Speed);
analogWrite(motor2EnablePin, Speed);
if((distanceFwd<set) && (chk==1)){chk = 2; Stop();}
if(distanceFwd>set){chk = 0;}
// if the state is '1' the DC motor will go forward
if ((state == 1) && (chk==0)){chk = 1; forword();Serial.println("Go Forward!");}
// if the state is '2' the motor will Reverse
else if (state == 2){backword();Serial.println("Reverse!");}
// if the state is '3' the motor will turn left
else if (state == 3){turnLeft();Serial.println("Turn LEFT");}
// if the state is '4' the motor will turn right
else if (state == 4){turnRight();Serial.println("Turn RIGHT");}
// if the state is '5' the motor will Stop
else if (state == 5) {Stop();Serial.println("STOP!");}
timer = timer+1;
Serial.println(timer);
if(timer==200)
{
if(distanceFwd>200){distanceFwd=200;}
BT.print("A");
BT.print(";");
BT.print(distanceFwd); //send distance to MIT App
BT.println(";");
}
if(timer>400)
{
DHT.read11(dht_pin);
hum = DHT.humidity;
temp = DHT.temperature;
BT.print("B");
BT.print(";");
BT.print(temp); //send distance to MIT App
BT.print(";");
BT.print(hum); //send distance to MIT App
BT.println(";");
timer=0;
}
delay(1);
}
void forword(){
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}
void backword(){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
}
void turnRight(){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}
void turnLeft(){
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
}
void Stop(){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
}
long data()
{
digitalWrite(trigpin,LOW);
delayMicroseconds(2);
digitalWrite(trigpin,HIGH);
delayMicroseconds(10);
duration=pulseIn (echopin,HIGH);
return duration / 29 / 2;
}