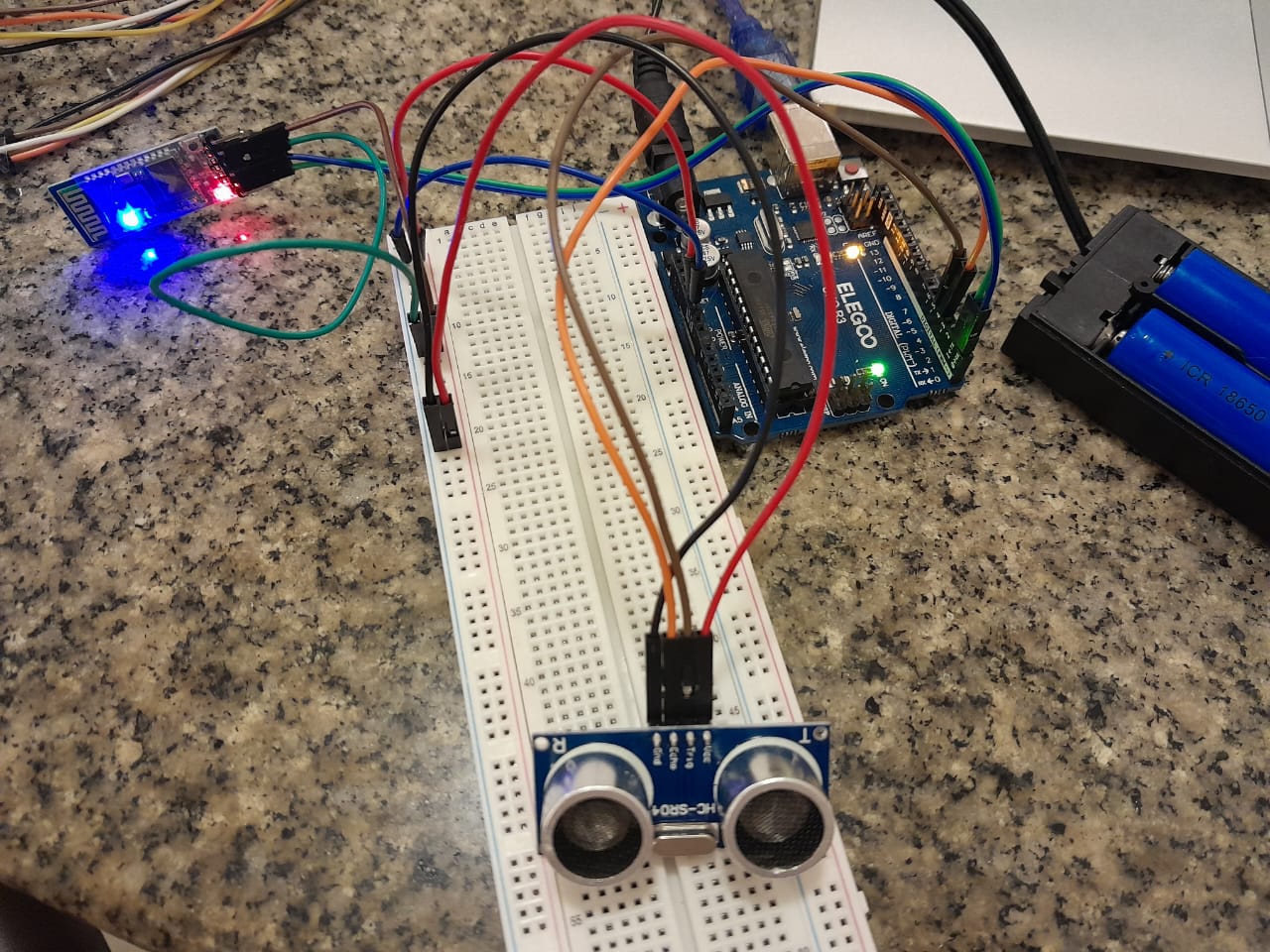
Hello, I am making a joystick-controlled robotic car for my project. When an obstacle is detected by the ultrasonic sensors, it should send this data to the mobile app and the app will produce a sound to alert the user.
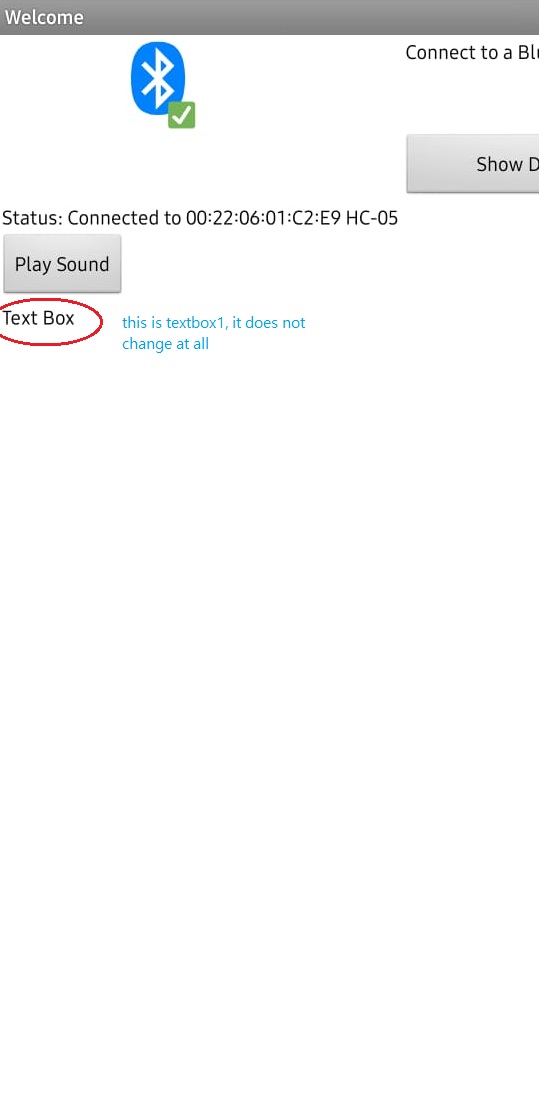
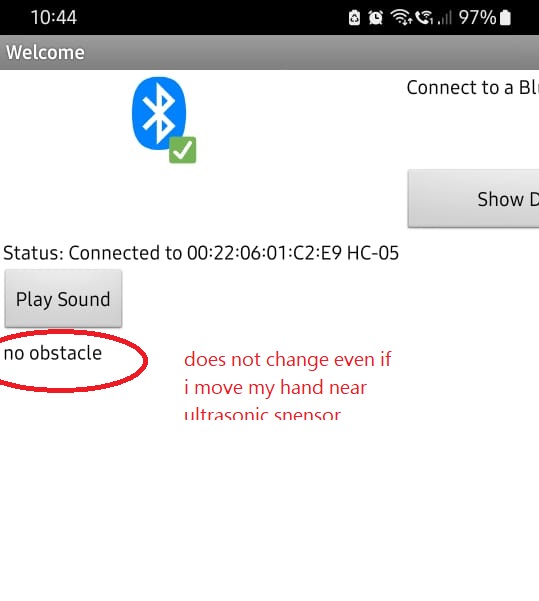
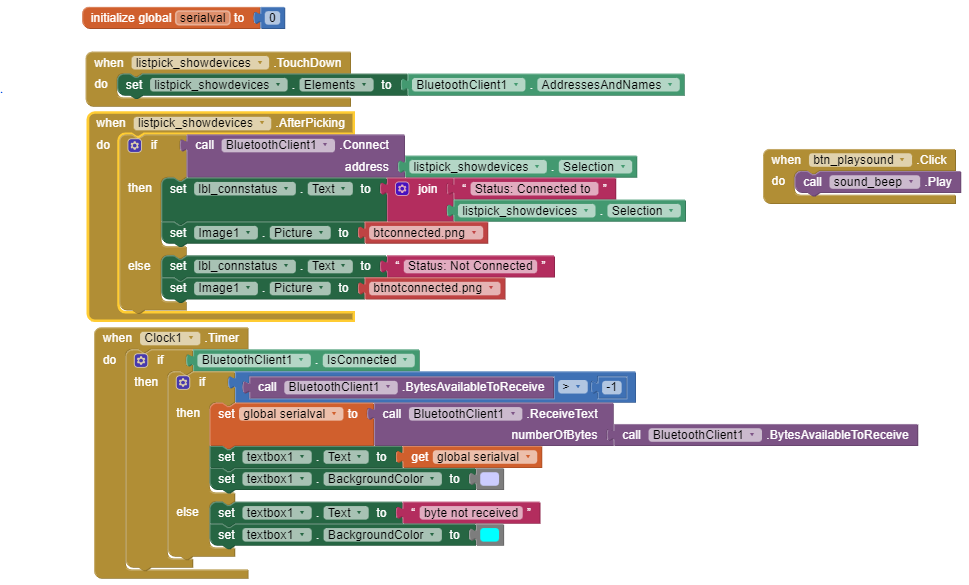
I am having issues with the app not receiving the data which is sent by the Arduino.
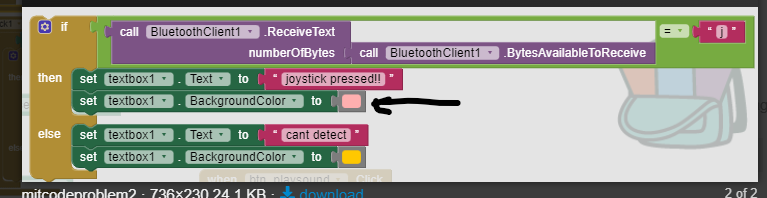
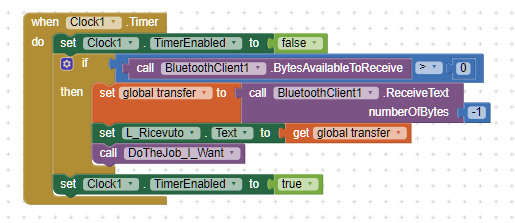
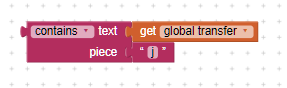
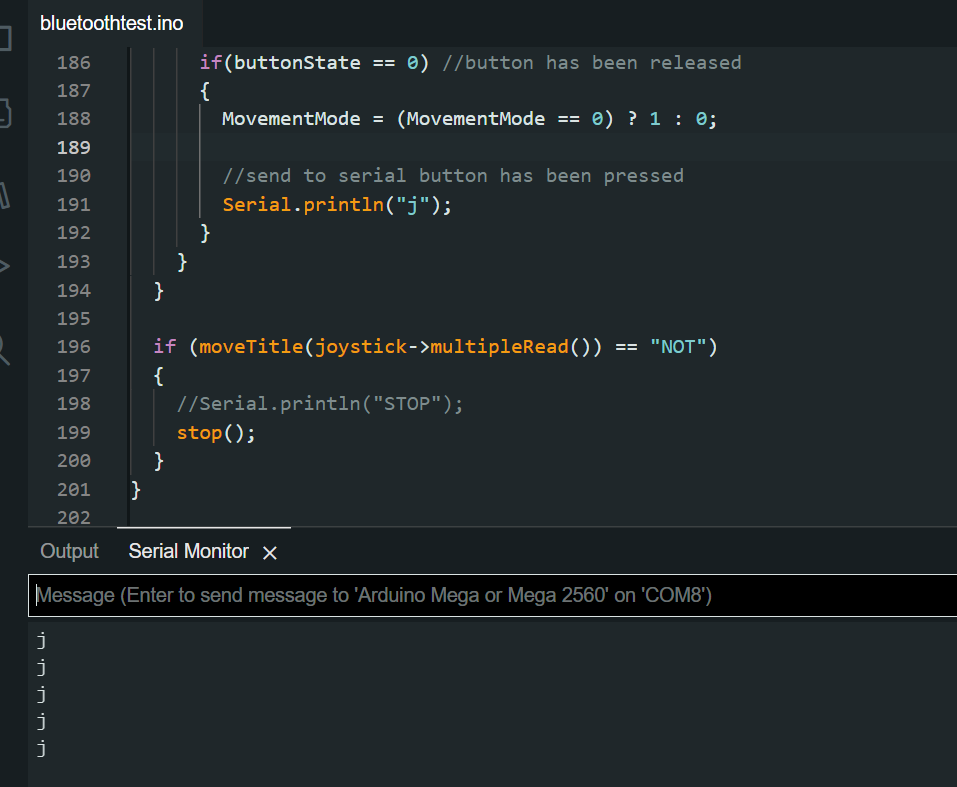
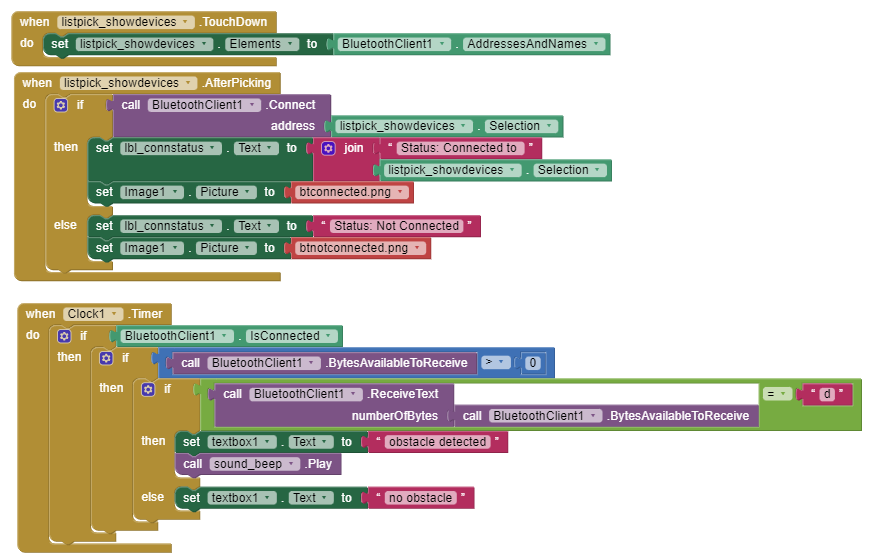
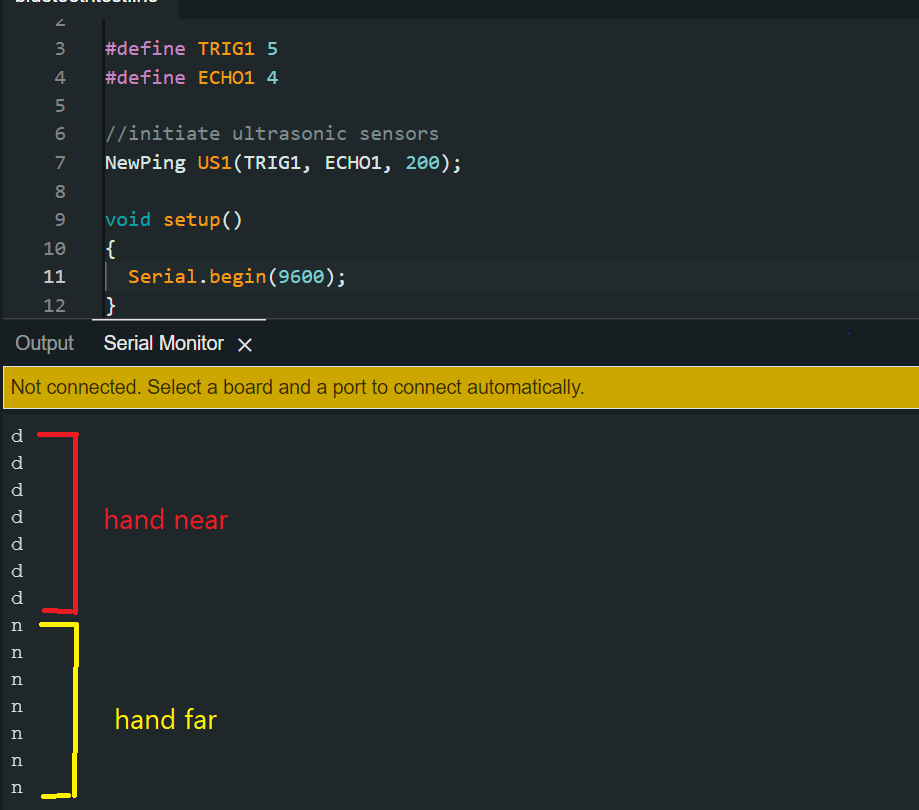
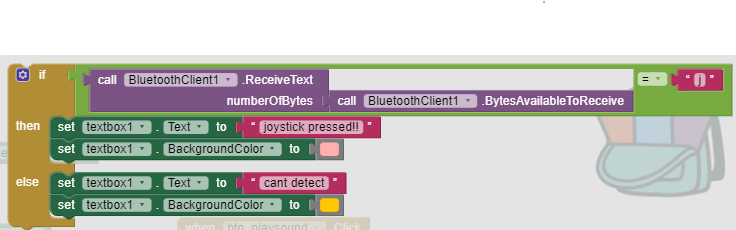
To test a simple scenario, I just want the app to make a 'beep' sound when the joystick is pressed. The Arduino IDE will Serial.println("j") just fine, but it is somehow not received by the app. I watched tutorials which used call BluetoothClient1.BytesAvailableToReceive > 0 but it didn't work. I changed the value to > -1 and got some progress. But still, it is not producing the sound when the joystick is pressed.
I am in need of help and I greatly appreciate any assistance I can get. Thank you
#include <Joystick.h>
#include <AxisJoystick.h>
#include <AFMotor.h>
#include <NewPing.h>
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
//jotstick pins
#define joystick_SWPIN A10
#define joystick_XPIN A8
#define joystick_YPIN A9
//ultrasonic sensor #1 (front center)
#define TRIG1 22
#define ECHO1 24
//ultrasonic sensor #2 (left side)
#define TRIG2 26
#define ECHO2 28
//ultrasonic sensor #3 (right side)
#define TRIG3 30
#define ECHO3 32
//for car movement
int speeds = 100;
Joystick* joystick;
unsigned long debounceDuration = 50;
unsigned long lastTimeButtonStateChanged = 0;
byte lastButtonState = 0; //released
byte MovementMode = 0; //0=translation, 1=rotation
//initiate ultrasonic sensors
NewPing US1(TRIG1, ECHO1, 200);
NewPing US2(TRIG2, ECHO2, 200);
NewPing US3(TRIG3, ECHO3, 200);
void setup()
{
Serial.begin(9600);
joystick = new AxisJoystick(joystick_SWPIN, joystick_XPIN, joystick_YPIN);
motor1.setSpeed(speeds);
motor2.setSpeed(speeds);
motor3.setSpeed(speeds);
motor4.setSpeed(speeds);
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
pinMode(joystick_SWPIN, INPUT_PULLUP);
}
void loop()
{
int US1_distance = US1.ping_cm();
int US2_distance = US2.ping_cm();
int US3_distance = US3.ping_cm();
/*
Serial.print("Distance US1: ");
Serial.print(US1_distance);
Serial.print(" cm\n");
delay(50);
Serial.print("Distance US2: ");
Serial.print(US2_distance);
Serial.print(" cm\n");
delay(50);
Serial.print("Distance US3: ");
Serial.print(US3_distance);
Serial.print(" cm\n");
delay(50);
*/
//int obstacle = checkdistance(distanceInCm);
if(MovementMode == 0) //MODE: TRANSLATION
{
if(joystick->readVRx()==0 && joystick->readVRy()>=253 && joystick->readVRy()<=759)
{
//Serial.println("UP");
if(checkfront(US1_distance) == 0) //no obstacle
{
forward();
}
else
{
//Serial.println("OBSTACLE FRONT");
stop();
}
}
if(joystick->readVRx()==1023 && joystick->readVRy()>=253 && joystick->readVRy()<=759)
{
//Serial.println("DOWN");
backward();
}
if(joystick->readVRx()>=253 && joystick->readVRx()<=739 && joystick->readVRy()==1023)
{
//Serial.println("LEFT");
if(checkleft(US2_distance) == 0)
{
left();
}
else
{
//Serial.println("OBSACLE LEFT");
stop();
}
}
if(joystick->readVRx()>=253 && joystick->readVRx()<=759 && joystick->readVRy()==0)
{
//Serial.println("RIGHT");
if(checkright(US3_distance) == 0)
{
right();
}
else
{
//Serial.println("OBSACLE RIGHT");
stop();
}
}
if(joystick->readVRx()>=0 && joystick->readVRx()<=253 && joystick->readVRy()>=0 && joystick->readVRy()<=253)
{
//Serial.println("FORWARD RIGHT");
forwardright();
}
if(joystick->readVRx()>=0 && joystick->readVRx()<=253 && joystick->readVRy()>=759 && joystick->readVRy()<=1023)
{
//Serial.println("FORWARD LEFT");
forwardleft();
}
if(joystick->readVRx()>=739 && joystick->readVRx()<=1023 && joystick->readVRy()>=759 && joystick->readVRy()<=1023)
{
//Serial.println("BACKWARDS LEFT");
backwardleft();
}
if(joystick->readVRx()>=759 && joystick->readVRx()<=1023 && joystick->readVRy()>=0 && joystick->readVRy()<=253)
{
//Serial.println("BACKWARDS RIGHT");
backwardright();
}
}
else //MODE: ROTATION
{
if(joystick->readVRx()>=253 && joystick->readVRx()<=739 && joystick->readVRy()==1023)
{
//Serial.println("ROTATE LEFT");
rotateleft();
}
if(joystick->readVRx()>=253 && joystick->readVRx()<=759 && joystick->readVRy()==0)
{
//Serial.println("ROTATE RIGHT");
rotateright();
}
}
unsigned long timeNow = millis();
if(timeNow - lastTimeButtonStateChanged > debounceDuration)
{
byte buttonState = joystick->isPress();
if(buttonState != lastButtonState)
{
lastTimeButtonStateChanged = timeNow;
lastButtonState = buttonState;
if(buttonState == 0) //button has been released
{
MovementMode = (MovementMode == 0) ? 1 : 0;
//send to serial button has been pressed
Serial.println("j");
}
}
}
if (moveTitle(joystick->multipleRead()) == "NOT")
{
//Serial.println("STOP");
stop();
}
}
String moveTitle(const Joystick::Move move)
{
switch (move)
{
case Joystick::Move::NOT:
return "NOT";
case Joystick::Move::PRESS:
return "PRESS";
case Joystick::Move::UP:
return "LEFT";
case Joystick::Move::DOWN:
return "RIGHT";
case Joystick::Move::RIGHT:
return "DOWN";
case Joystick::Move::LEFT:
return "UP";
default:
return "???";
}
}
int checkfront(int US1_distance)
{
if(US1_distance > 20 || US1_distance == 0) //no obstacle
{
return 0;
}
else //got obstacle
{
return 1;
}
}
int checkleft(int US2_distance)
{
if(US2_distance > 20 || US2_distance == 0) //no obstacle
{
return 0;
}
else //got obstacle
{
return 1;
}
}
int checkright(int US3_distance)
{
if(US3_distance > 20 || US3_distance == 0) //no obstacle
{
return 0;
}
else //got obstacle
{
return 1;
}
}
void stop(){
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void forward() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void right() {
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}
void left() {
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
void forwardright() {
motor1.run(RELEASE);
motor2.run(FORWARD);
motor3.run(RELEASE);
motor4.run(FORWARD);
}
void forwardleft() {
motor1.run(FORWARD);
motor2.run(RELEASE);
motor3.run(FORWARD);
motor4.run(RELEASE);
}
void backwardleft() {
motor1.run(RELEASE);
motor2.run(BACKWARD);
motor3.run(RELEASE);
motor4.run(BACKWARD);
}
void backwardright() {
motor1.run(BACKWARD);
motor2.run(RELEASE);
motor3.run(BACKWARD);
motor4.run(RELEASE);
}
void rotateleft() {
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
void rotateright() {
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}